儘儃僛儘僒乕儃偱億僀儞僩惂屼
2011擭11寧29擔
丂崱傑偱儘儃僛儘偺僒乕儃傪巊偭偰楍幵偺惂屼偲懍搙偺惂屼傪傗偭偰傒傑偟偨偑丄巆傞億僀儞僩偺愗傝懼偊傕偙偺僒乕儃偱峴偭偰傒偨偄偲巚偄傑偡丅
丂峫偊偰傒傞偲崱傑偱僒乕儃偱揹婥揑側惂屼傪峴偭偰偒傑偟偨偑丄崱夞偼億僀儞僩偲偄偆暔棟揑側惂屼側偺僒乕儃傪巊偆偺偑堦斣棟偵揔偭偰偄偦偆偱偡丅
丂崱夞夵憿偡傞偺偼TOMIX偺揹摦億僀儞僩偱乽徍榓偺揝摴柾宆傪嶌傞乿傗乽揝摴柾宆彮擭帪戙乿偱巊傢傟偰偄偨億僀儞僩偱偡丅
丂揹摦億僀儞僩傪巊偆偲偄偭偰傕揹婥偱愗傝懼偊傞栿偱傕側偄偺偱庤摦億僀儞僩傗懠偺僞僀僾偺億僀儞僩偱傕偱偒傞偲巚偄傑偡丅
丂傑偢億僀儞僩偺僣儅儈偵儘僢僪傂偭偐偗傞寠(0.6mm埵)傪僺儞僶僀僗偱奐偗傑偡丅

丂寠偺埵抲偼忋偐傜1.5mm埵偺拞墰偵奐偗傑偡丅
丂偁傑傝壓偩偲儘僢僪偑慄楬偵傂偭偐偐傝摦偒偵偔偔側傝傑偡丅
丂傑偨偁傑傝忋偩偲僣儅儈偑妱傟偰偟傑偆壜擻惈偑偁傝傑偡丅
丂師偵億僀儞僩偲僒乕儃傪偮側偖儘僢僪傪嶌惉偟傑偡丅
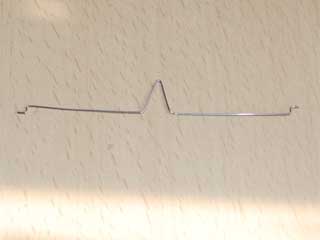
丂崱夞偼0.5mm偺僺傾僲慄傪巊偄傑偟偨丅
丂僺傾僲慄傪忋恾偺傛偆偵愜傝嬋偘傑偡丅
丂拞墰偺嶳偼僒乕儃偑億僀儞僩偺壱摦斖埻傪墇偊偰嶌摦偟偰傕億僀儞僩傗僒乕儃傪夡偝側偄傛偆偵偡傞偨傔偺傕偺偱偡丅
丂偙偺嶳偼儗僀傾僂僩偑寶偰崬傫偱偄傞応崌偼悅捈偵棫偰偰傕峔偄傑偣傫丅
丂側偍崱夞偼僥僗僩梡偺儗僀傾僂僩側偺偱偪傖傫偲偟偨儗僀傾僂僩偵慻傒崬傓帪偼僒乕儃傪塀偡摍偺岺晇偑昁梫偱丄
丂偦傟偵墳偠偰儘僢僪偺宍忬傕曄偊傞昁梫偑偁傞偲巚偄傑偡丅
丂嵍懁偺僋儔儞僋傪億僀儞僩偺僣儅儈偵奐偗偨寠偵捠偟傑偡丅

丂偙偺帪儘僢僪偺愭抂偑儗乕儖傗枍栘偵側傞傋偔摉偨傜側偄傛偆偵偟偰偔偩偝偄丅
丂師偵傕偆曅曽偺僋儔儞僋傪僒乕儃儂乕儞偺寠偵捠偟傑偡丅

丂偙偺僒乕儃儂乕儞傪僒乕儃幉偵庢傝晅偗傑偡丅
丂偙偺帪僒乕儃偼僯儏乕僩儔儖埵抲偵偟偰偍偄偰偔偩偝偄丅
丂傑偨僋儔儞僋傪庢傝晅偗偨寠偼堦斣壓偵棃傞傛偆偵僙僢僩偟偰偔偩偝偄丅(90搙偺埵抲偵僒乕儃儂乕儞偺寠偑側偄偨傔僒乕儃儂乕儞偺栚報偲僒乕儃幉偺栚報偼崌偭偰偄傑偣傫)
丂僒乕儃偺愝抲埵抲傪寛傔傑偡丅
丂僒乕儃偺僯儏乕僩儔儖埵抲(儘僢僪埵抲偑恀壓)偱偺忬懺偵偟偰億僀儞僩偺僣儅儈偑僗儔僀僪偡傞挌搙拞娫偺埵抲偵棃傞傛偆偵偟偰偔偩偝偄丅
丂側偍愗懼帪偺僒乕儃偺妏搙偼屻偐傜僾儘僌儔儉偱挷惍偱偒傑偡偺偱偦傟傎偳尩枾偱側偔偰傕峔偄傑偣傫丅
丂埵抲偑寛傑偭偨傜椉柺僥乕僾(嫮椡)偱僒乕儃傪屌掕偟傑偡丅
丂幚嵺偺儗僀傾僂僩偵慻傒崬傓帪偼楍幵傪楍幵偺惂屼偺帪偵嶌偭偨儀乕僗斅偺傛偆側傕偺偱儗僀傾僂僩偵屌掕偡傞昁梫偑偁傞偲巚偄傑偡丅
丂僐儞僺儏乕僞偲偺愙懕偼偄傑傑偱捠傝僔儕傾儖曄姺儃乕僪傪夘偟偰峴偄傑偡丅
丂崱夞僒乕儃偑俁偮偵憹偊偨偺偱僒乕儃懁傪俁偮暘婒偟偨僕儍儞僷乕慄傪嶌惉偟傑偟偨丅

丂儃乕僪懁偼庤帩偪偺4P僐僱僋僞傪巊偭偰偄傑偡丅
丂惂屼僾儘僌儔儉偼崱夞俶俙俿俷俠傪僶乕僕儑儞傾僢僾偟偰懳墳偟傑偟偨丅
丂愝掕儊僯儏偺僒乕儃惂屼愝掕僐儅儞僪偱僒乕儃偺妏搙傪挷惍偡傞帠偑偱偒傑偡丅
丂懍搙挷惍偼幚嵺偵楍幵傪摦偐偟側傜嵟崅懍搙偲嵟掅懍搙偺僒乕儃偺妏搙傪寛傔傜傟傑偡丅
丂億僀儞僩偼幚嵺偵億僀儞僩傪愗懼側偑傜摦嶌偡傞傛偆偵挷惍偡傞帠偑偱偒傑偡丅
丂僒乕儃ID傕俶俙俿俷俠偱娙扨偵峴偆帠偑偱偒傑偡丅
丂曄峏偡傞僒乕儃偩偗傪愙懕偟偰偍偄偰偳偺僒乕儃梡偺ID偵偡傞偐僟僀傾儘僌偵僠僃僢僋偟偰偍偒傑偡丅
丂偙偺僟僀傾儘僌偺僒乕儃ID曄峏儃僞儞傪墴偡偲僒乕儃ID偑曄峏偝傟傑偡丅
丂僒乕儃偺愙懕偑愗傟偰傕僒乕儃偺ROM傪彂偒姺偊傞偨傔曄峏偝傟偨僒乕儃ID偼偦偺傑傑曐帩偝傟傑偡丅
丂尦偺僒乕儃ID偵栠偟偨偄帪偼偙偺僟僀傾儘僌偺岺応弌壸帪偵栠偡儃僞儞偱僒乕儃傪尦偺忬懺偵栠偣傑偡丅
丂幚嵺偵俶俙俿俷俠偺帺摦塣揮傪巊偭偰億僀儞僩偺愗懼偲懍搙曄峏傪峴偭偨摦夋偱偡丅
丂丂丂丂丂
丂億僀儞僩傪愗傝懼偊傞偲摨帪偵備偭偔傝儂乕儉偵擖慄偡傞傛偆偵懍搙傪棊偲偡傛偆柦椷(壗昩偐偗偰壗%偺懍搙偵偡傞)偟偰偄傑偡丅
丂僇儊儔偵傛傞埵抲擣幆偱儂乕儉偺抂偵掆幵偟傑偡丅
丂僞僀儅乕婡擻傪巊偭偰敪幵偟傑偡偑偙偺帪傕嵟崅懍(100%)傑偱彊乆偵僗僺乕僪傪忋偘偰傞傛偆僾儘僌儔儉偟偰偄傑偡丅
丂側偍嵟崅懍搙傪忋偘傞偨傔僐儞僩儘乕儔偺揹尮揹埑傪12V偵偟偰偄傑偡丅
丂崱夞丄慜恑/屻恑/掆巭偺惂屼偍傛傃懍搙惂屼偵壛偊偰億僀儞僩偺愗懼偑偱偒傞傛偆偵側傝傑偟偨丅
丂儘儃僛儘偺僒乕儃俁偮偲USB僔儕傾儖曄姺儃乕僪侾枃偱幚尰偱偒傞偺偱廬棃偺USB I/O僐儞僩儘乕儔傛傝彮偟埨偔愙懕偱偒傑偡丅
丂傑偨USB I/O僐儞僩儘乕儔偱偼幚尰偱偒側偐偭偨懍搙惂屼傕偱偒傞傛偆偵側傝傑偟偨丅
丂崱夞偙偺僒乕儃傪僒億乕僩偟偨NATOC 2.80偼儊僨傿傾僋儔僼僩偺儂乕儉儁乕僕傛傝僟僂儞儘乕僪偡傞帠偑偱偒傑偡丅
丂僒乕儃儌乕僞乕偺夵憿偑敽偆偺偱偁偔傑偱傕帺屓愑擟偲偄偆帠偱偍婅偄偟傑偡丅
栚師偵栠傞